- Главная
- Разное
- Бизнес и предпринимательство
- Образование
- Развлечения
- Государство
- Спорт
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Религиоведение
- Черчение
- Физкультура
- ИЗО
- Психология
- Социология
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Геометрия
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
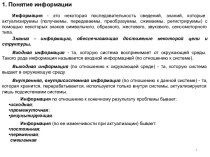
Что такое findslide.org?
FindSlide.org - это сайт презентаций, докладов, шаблонов в формате PowerPoint.
Обратная связь
Email: Нажмите что бы посмотреть
Презентация на тему по робототехнике Операции с данными
Содержание
- 2. Данные. Типы данных Выводна экран
- 3. Задание 1Что происходит при выполнении программы?
- 4. Датчик вращения мотора
- 5. Напишите программу, которая постоянно выводит расстояние, которое прошел робот на экранЗадание 2
- 6. Палитра операции с даннымиПеременнаяКонстантаОперации над массивомЛогические операцииМатематикаОкруглениеСравнениеИнтервалТекстСлучайное значение
- 7. КонстантаДля константы можно только в явном виде
- 8. ПеременнаяДля переменной возможны два режима работы –
- 9. ПримерПеременная B получает начальное значение 3. Из
- 10. Математика, сравнение, округление
- 11. По квадрату с объявлениемРобот объезжает квадрат четыре
- 12. Объявляю, сколько раз кликнули по кнопке На экране отображается количество нажатий кнопки «2».
- 13. Вычислим разность прохождения по разным моторам
- 14. Выравниваем робота
- 15. Задача о прямолинейном движении робота (синхронизация моторов)Робот движется по прямой, мощность моторов 50. Синхронизировать движение моторов
- 16. Ультразвуковой датчик единичныйнепрерывный
- 17. Создать программу «робот едет вперед и произносит
- 18. Скачать презентацию
- 19. Похожие презентации
Данные. Типы данных Выводна экран


















Слайд 6
Палитра операции с данными
Переменная
Константа
Операции над массивом
Логические операции
Математика
Округление
Сравнение
Интервал
Текст
Случайное значение
Слайд 7
Константа
Для константы можно только в явном виде задать
значение, а потом его считать.
1 шаг
Выбираем тип
2 шаг
Заполняем значения
3
шагПередаем
Слайд 8
Переменная
Для переменной возможны два режима работы – запись
(присваивание) и считывание (получение значения).
Считыванию всегда предшествует запись, т.е.
прежде чем «выдать» значение, переменная каким-то образом должна его получить ( например, с помощью инициализации, т.е. просто записи «руками» или при помощи передачи значения «от чего либо»1
Слайд 9
Пример
Переменная B получает начальное значение 3. Из переменной
B значение считывается и это значение «получает» переменная С
Слайд 11
По квадрату с объявлением
Робот объезжает квадрат четыре раза.
Каждый раз он объявляет номер квадрата, который объезжает на
каждом делаемый им повороте, а так же высвечивает цифру на экране.
Слайд 12
Объявляю, сколько раз кликнули по кнопке
На экране
отображается количество нажатий кнопки «2».
Слайд 15
Задача о прямолинейном движении робота (синхронизация моторов)
Робот движется
по прямой, мощность моторов 50. Синхронизировать движение моторов
Слайд 17 Создать программу «робот едет вперед и произносит «go»,