- Главная
- Разное
- Бизнес и предпринимательство
- Образование
- Развлечения
- Государство
- Спорт
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Религиоведение
- Черчение
- Физкультура
- ИЗО
- Психология
- Социология
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Геометрия
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Что такое findslide.org?
FindSlide.org - это сайт презентаций, докладов, шаблонов в формате PowerPoint.
Обратная связь
Email: Нажмите что бы посмотреть
Презентация на тему Передающие преобразователи и системы дистанционной передачи с естественными сигналами
Содержание
- 2. 1. Назначение и классификация передающих преобразователей. Дистанционная
- 3. В измерениях чаще всего применяются приборы с
- 4. Системы дистанционной передачи показаний включают в себя
- 5. 2. Основы техники измерений с первичными
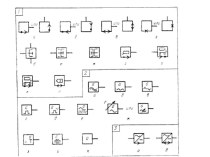
- 6. На рисунке представлена схема электрическая реостатной системы передачи измерительной информации.
- 7. От вторичной обмотки трансформатора Tp1 выпрямленное напряжение
- 8. Индукционная система передачи показаний строится
- 9. Индукционная система передачи сейчас заменена более совершенной
- 10. Скачать презентацию
- 11. Похожие презентации
1. Назначение и классификация передающих преобразователей. Дистанционная передача – передача информации на расстояние без использования дополнительных устройств. Передавать на расстояние можно непосредственно измеряемую величину или полученную в результате преобразования пропорциональную ей другую величину.










Слайд 3
В измерениях чаще всего применяются приборы с дистанционной
передачей на расстояние следующих величин:
1. угловых перемещений — поворота
оси манометра;2. линейных перемещений поплавка, сильфона, мембраны, и других элементов;
3. угловых перемещений в большом диапазоне углов с измерением, как интегрального значения угла, так и мгновенной скорости вращения (измерение расхода и количества газа или жидкости скоростными или объемными счетчиками с вращающимися элементами);
4. усилий и вращающихся моментов в компенсационных схемах, преобразующих, например, усилия, возникающие в мембране, в соответствующие электрические величины.
Слайд 4
Системы дистанционной передачи показаний включают в себя передающий
преобразователь, канал связи и приемное устройство. По виду используемой
ими энергии они бывают электрические и пневматические.Электрические системы дистанционной передачи показаний бывают реостатные, индукционные, дифференциально-трансформаторные и токовые.
Слайд 5
2. Основы техники измерений с первичными преобразователями.
Реостатные
системы передачи обычно реализуются мостовыми схемами (рис). При появлении
сигнала рассогласования в диагонали моста возникает мощность Р, которая воздействует на реверсивный двигатель, восстанавливающий перемещением движка (Sдв) равновесие в схеме моста. Таким образом, перемещение движка (Sдв) приемника следует за перемещением движка (Sр) у датчика.И — индикатор рассогласования; Д — реверсивный двигатель; Sдв - перемещение чувствительного элемента датчика; Sр — перемещение движка датчика
Слайд 6
На рисунке представлена схема электрическая реостатной системы передачи
измерительной информации.
Слайд 7
От вторичной обмотки трансформатора Tp1 выпрямленное напряжение подается
на резистор R1,R2 и реостатный датчик ДР. В диагональ
образованного этими резисторами моста включен измерительный прибор μΑ. При увеличении измеряемой величины движок ДР перемещается, мост разбалансируется и в диагонали протекает ток, пропорциональный перемещению движка ДР. С помощью резистора R1 устанавливают степень чувствительности прибора, а R2 служит для балансировки моста. ДР соединен с чувствительным элементом передающего преобразователя.Надежность реостатных систем невелика из-за недостаточной надежности самого скользящего контакта.
Реостатные системы применяются для передачи информации об изменении технологических параметров, в качестве элементов обратной связи в схемах регулирования, у которых движок потенциометра связывается с валом исполнительного механизма системы регулирования, а также в дистанционной передаче положения (указателя положения) регулирующих органов и других элементов машин и механизмов и т. д.
Слайд 8
Индукционная система передачи показаний строится по
тому же принципу, что и реостатная. Мост переменного тока
питается от трансформатора Tp1 (рис.). Диоды VD1 и VD2 выпрямляют ток в диагонали моста. Индуктивный датчик ДИ представляет собой катушку индуктивности, средняя точка которой включена в диагональ моста. В катушке перемещается, пропорционально изменению измеряемой величины, сердечник из магнитного материала. Если при среднем положении сердечника мост сбалансирован (балансировка осуществляется резистором R2), то при изменении измеряемой величины сердечник, перемещаясь вверх или вниз, будет изменять индуктивность, а следовательно, и сопротивление переменному току плечей моста. В диагонали появится ток.
Слайд 9
Индукционная система передачи сейчас заменена более совершенной дифференциально-трансформаторной,
которая используется для передачи малых и средних линейных перемещений
Схема дифференциально-трансформаторной системы передачи:
Т1 — датчик, Т2 — приемник, РД — реверсивный электродвигатель, У— усилитель.